Gesture-Controlled Robotic Arm
Problem: Control a robotic arm using hand gestures — no buttons, no joystick. AI reads movements in real time using gesture recognition.
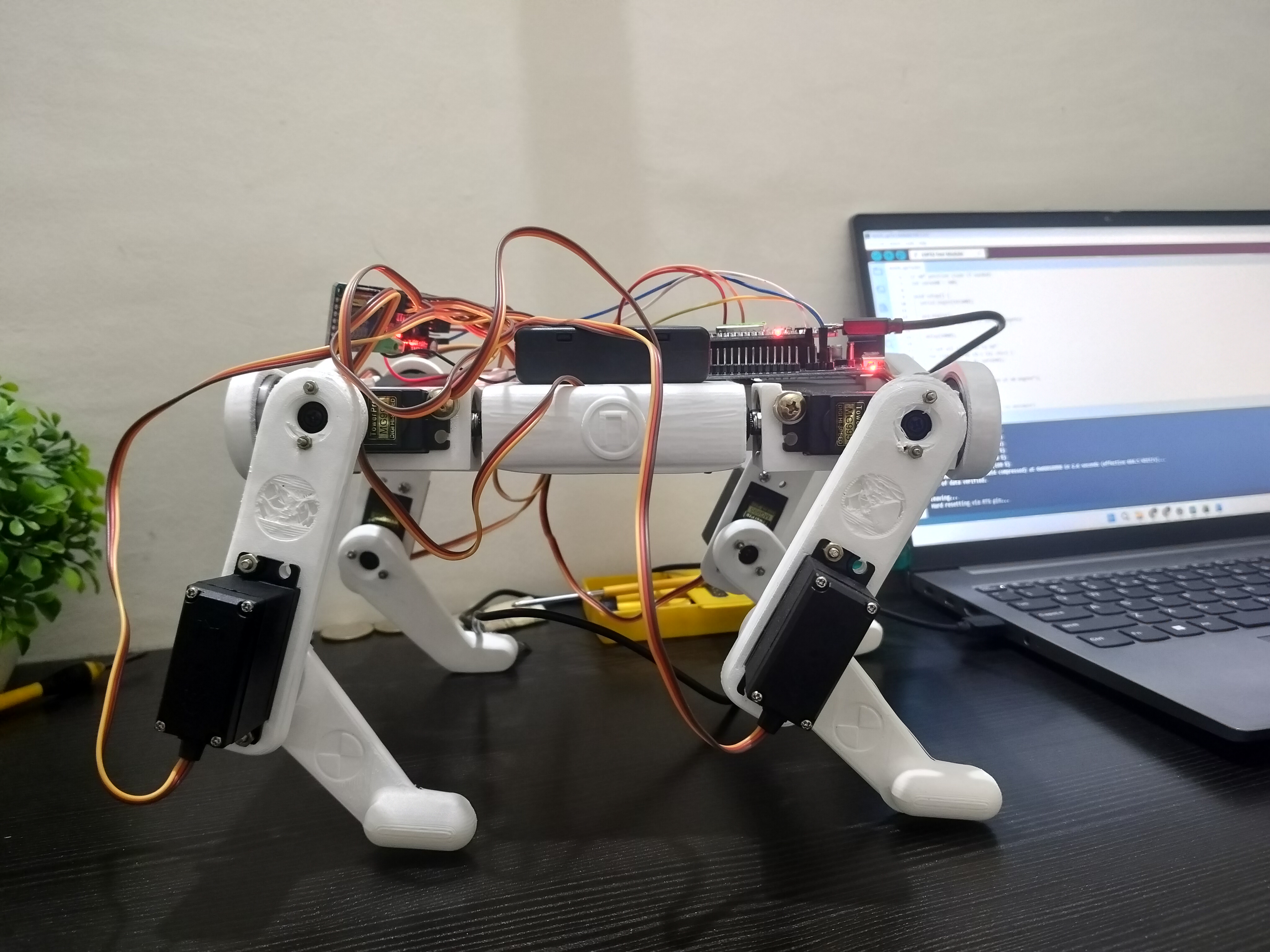
Robotic Dog
Problem: Four-legged walking robot that mimics animal locomotion using Gait Algorithms and adaptive movement control.
Self-Balancing Robot
Problem: Two-wheeled inverted pendulum robot maintaining balance using PID control and real-time gyroscope stabilisation.

Sensor Data Logger & Pattern Analyzer
Problem: Collect real-world sensor data and observe patterns over time — understanding how machines gather and interpret information.

Decision Tree Logic Machine
Problem: Build a multi-condition logic system using layered IF-THEN decision rules — foundation of ML models and computational thinking.

MakerDost Bot — Motion Foundations
Problem: Build your first programmable robot and master structured movement logic — decision-tree thinking in a physical machine.

Smart Traffic Intelligence System
Problem: Design a rule-based traffic automation system using structured logic and multiple sensor inputs.
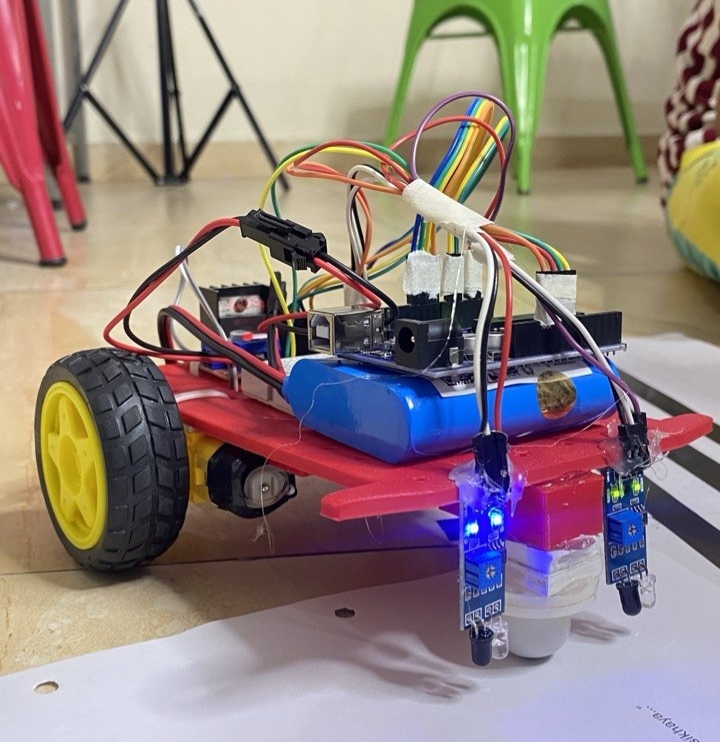
Intelligent Line Tracking Rover
Problem: Create a rover that follows a path using real-time IR sensor feedback — foundation of all autonomous navigation systems.

Autonomous Obstacle Navigation Rover
Problem: Build a robot that detects and avoids obstacles independently — making real-time decisions without any human input.

Competitive Object Delivery Rover
Problem: Design a rover with precision object placement for school competitions — combining navigation, avoidance, and delivery.

Vision-Based Object Recognition Rover
Problem: Train a simple AI model using custom data and connect predictions to robotic movement — where robotics meets machine learning.

AI Gesture Control System
Problem: Collect gesture data, train a model, and control robots using real-time AI-based gesture recognition with neural networks.
Smart Delivery Bot
Problem: Programmable robotic mobility system for object transportation and controlled navigation with precision movement.

4-DOF Robotic Arm
Problem: Build and program a robotic arm capable of executing structured pick-and-place and repeatable task operations.

Otto Smart Humanoid
Problem: Walking humanoid robot introducing coordinated movement, programmed gestures, and sound-based interaction.

Intelligent Warehouse Coordination Rover
Problem: Structured robotics system simulating warehouse coordination with task-based navigation and multi-step execution logic.
Precision Solar Optimization Platform
Problem: Build a dual-axis solar tracking system using closed-loop feedback and LDR sensors to maximise energy capture.

Smart Environment Intelligence Module
Problem: Monitor temperature, humidity, and light in real time and trigger intelligent alerts based on environmental changes.

Intelligent Agriculture Automation System
Problem: Design a smart irrigation system that monitors soil moisture and automates water delivery using sensor-based feedback.

Intelligent Systems Capstone Kit
Problem: Design and build your own intelligent system using sensors, decision logic, and actuator integration — concept to demonstration.

Wireless Competitive Rover Challenge
Problem: Teams build Bluetooth-enabled rovers for real-time competition challenges and tactical missions under pressure.

Smart Surveillance & Intrusion Detection
Problem: Multi-sensor security prototype combining motion, vibration, and environmental detection for real-time alert systems.